 Español
Español-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย -
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик - Español
-
 Português
Português


Hogar
>
Productos > Máquina combinada de torneado y fresado
>
Fresadora y torneado de ranuras interiores de tres curvas
Productos






Fresadora y torneado de ranuras interiores de tres curvas
La máquina fresadora y torneadora de ranuras interiores de tres curvas Jingfusi® es una herramienta de mecanizado especializada que se utiliza para el mecanizado de precisión de ranuras interiores con tres superficies curvas o contorneadas. Esta máquina fresadora y torneadora de ranuras internas de tres curvas se emplea comúnmente en industrias que requieren la producción de piezas complejas con ranuras o perfiles internos que no se pueden crear fácilmente utilizando métodos de mecanizado convencionales.
Modelo:CK46-3+2
Enviar Consulta
Descripción del Producto
Si bien se utilizan principalmente para el mecanizado de ranuras interiores, estas máquinas también pueden realizar otras operaciones de mecanizado, lo que las hace versátiles para una amplia gama de aplicaciones. Industrias como la aeroespacial, la fabricación de dispositivos médicos, la automoción y la ingeniería de precisión a menudo dependen de estas máquinas para producir componentes complejos y de alta precisión. Las máquinas de fresado y torneado de ranuras interiores de tres curvas pueden procesar diversos materiales, incluidos metales, plásticos y compuestos, según las necesidades específicas de mecanizado.
Diagrama de recorrido de la máquina

Detalles de producto

Lista de parámetros
| Artículo | unidad | Especificación |
| Máx. diámetro de giro | milímetros | 250 |
| Máx. diámetro de giro. sobre torno | milímetros | Ø500 |
| Máx. diámetro de giro a través de lecho deslizante | milímetros | Ø160 |
| Grado de cama inclinada | grado | 35° |
| Recorrido efectivo en el eje X | milímetros | 1000 |
| Viaje efectivo del eje Z | milímetros | 400 |
| Eje X/Z máx. velocidad de viaje rápida | m/min | 24 |
| Área de base de hierro fundido | ㎡ | 1,8 x 1,1 |
| Tamaño de la máquina: largo x ancho x alto | milímetros | 2100x1580x1800 |
| Peso neto de la máquina | kg | 2600 |
| herramienta no. | piezas | 8 |
| herramientas cuadradas | milímetros | 20 x 20 |
| Tamaño del cuchillo del agujero | milímetros | Ø20 |
| caballo total | kilovatios | 13 |
| Consumo medio de energía | kw/h | 2 |
| Forma de la cara del husillo |
|
A2-5 |
| Eje de velocidad | rpm | 6000 |
| Ajuste de velocidad del husillo | rpm | 1-4500 |
| Par nominal del husillo | Nuevo Méjico | 35Nm(1500r/min) |
| Diámetro máximo de la barra | milímetros | Ø45 |
Precisión de la máquina herramienta
| Precisión de la máquina, estándar del factor Jingfus: | ||||
| Elemento de prueba principal | Diagrama esquemático | Estándar de fábrica | ||
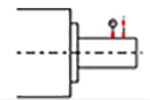
| Golpe radial del husillo, |
 |
Detectar descentramiento del cono exterior | 0.0035 | |
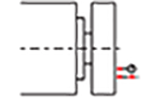
| Posición de repetición del eje X, X |
 |
Detecta posicionamiento repetido del eje X. Nota: Primero prediga unas 50 veces para compensar el error del motor frío y del motor caliente, y luego detecte el posicionamiento repetido. | 0.003 | |
| Posición de repetición del eje Z, Z |
 |
Detecta posicionamiento repetido en el eje Z. Nota: Primero prediga unas 50 veces para compensar el error del motor frío y del motor caliente, y luego detecte el posicionamiento repetido. | 0.003 | |
| Posición de repetición del eje C, C |
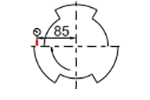 |
Detecte el reposicionamiento del punto fijo del eje C, nota: primero prediga unas 50 veces para compensar el error del motor frío y el motor caliente, y luego detecte el posicionamiento repetido | 20 segundos de arco | |
| Posición del eje C giratorio, C |
 |
Detecte la precisión de la posición aleatoria del eje C. Nota: primero prediga unas 50 veces para compensar el error del motor frío y del motor caliente, y luego verifique las configuraciones repetidas | 72 segundos de arco | |
| Si el cliente desea probar la precisión ISO o VD1 del eje X/Z/Y, deberá determinarse al momento de redactar el contrato. El cliente debe probar este artículo al mismo tiempo que la aceptación inicial de Jingfusi Factory. | ||||
Etiquetas calientes: Fresadora y torneado de ranuras interiores de tres curvas, China, fabricantes, proveedores, fábrica, calidad, lista de precios
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.
Productos relacionados









X
Utilizamos cookies para ofrecerle una mejor experiencia de navegación, analizar el tráfico del sitio y personalizar el contenido. Al utilizar este sitio, acepta nuestro uso de cookies.
política de privacidad